
Institut für Automatisierungs- und Regelungstechnik
Automatisierungs- und Regelungstechnik prägen die Entwicklung moderner technischer Systeme in grundlegender Weise. Sie ermöglichen es, dynamische Prozesse zu verstehen, gezielt zu beeinflussen und in zunehmend komplexen Umgebungen zuverlässig zu betreiben, etwa in der Robotik und in Systemen, in denen physikalisch basierte Modelle durch Methoden der Künstlichen Intelligenz ergänzt werden.
Das Institut für Automatisierungs- und Regelungstechnik (ACIN) der TU Wien steht seit Jahrzehnten für die konsequente Verbindung von systemtheoretischer Grundlagenforschung mit industrieller Anwendung. Ziel ist es, Methoden zu entwickeln, die nicht nur mathematisch fundiert sind, sondern sich auch in realen technischen Systemen bewähren.
Das heutige Institut entstand im Jahr 2002 aus der Zusammenführung des Instituts für Regelungstechnik und des Instituts für Flexible Automation. Diese Entwicklung markiert zugleich einen fachlichen Wandel: von der klassischen Regelung einzelner Systeme hin zur integrierten Betrachtung komplexer, vernetzter und zunehmend autonom agierender Systeme. Heute umfasst das ACIN ein Team von mehr als 50 Wissenschaftlerinnen und Wissenschaftlern und ist ein international sichtbarer Forschungspartner für Industrie und Wissenschaft. Charakteristisch ist die enge Verzahnung von Theorie und Anwendung. Dieser Ansatz prägt die Arbeit des Instituts bis heute und wird kontinuierlich weiterentwickelt.
Forschung
Die Forschung am ACIN konzentriert sich auf die Modellierung, Analyse und Regelung komplexer dynamischer Systeme sowie auf deren Anwendung in industriellen Prozessen, modernen Robotersystemen und physikalischen Systemen, etwa in der Photonik und Quantentechnologie. Dabei wird ein Ansatz verfolgt, der systemtheoretische Methoden mit konkreten technischen Fragestellungen verbindet und durch datenbasierte Verfahren und Methoden der Künstlichen Intelligenz ergänzt wird. Diese Ausrichtung spiegelt sich in zwei eng miteinander verbundenen Forschungsbereichen wider: Complex Dynamical Systems (CDS) und Robotic Systems Lab (RSL).
Complex Dynamical Systems (CDS)
Im Forschungsbereich Complex Dynamical Systems steht das Verständnis komplexer dynamischer Systeme im Mittelpunkt. Darauf aufbauend werden Methoden entwickelt, um deren Verhalten gezielt zu analysieren, zu beeinflussen und technisch nutzbar zu machen. Der integrierte Entwurf von Mechanik, Elektronik, Sensorik und Regelung bildet dabei die Grundlage. Dieser systemorientierte Ansatz wird heute konsequent erweitert, indem physikalisch basierte Modelle mit datenbasierten Strategien sowie Methoden des maschinellen Lernens und der Künstlichen Intelligenz kombiniert werden. Auf diese Weise entstehen Systeme, die ihr Verhalten an veränderte Bedingungen anpassen und neue Funktionalitäten erschließen können.
Die Forschungsarbeiten sind in mehrere thematische Bereiche gegliedert:
Industrielle Robotik und Fertigungssysteme
Im Mittelpunkt steht die Entwicklung von Methoden für flexible und effiziente Produktionsprozesse in Umgebungen mit hoher Variantenvielfalt und kleinen Losgrößen. Dazu zählen die Optimierung von Roboterarbeitszellen, die Bearbeitung komplexer Geometrien sowie sichere Mensch-Roboter-Interaktion und sensorbasierte Fertigungsverfahren, bei denen Kamerasysteme und weitere Sensorik die Roboterbewegung in Echtzeit beeinflussen.
Sehen und Wahrnehmen für Robotik
Dieser Bereich untersucht die Verknüpfung von Modellwissen und Sensordaten, um technischen Systemen eine robuste Wahrnehmung ihrer Umgebung zu ermöglichen. Ziel ist es, Systeme zu entwickeln, die ihre Umgebung erfassen und ihr Verhalten in dynamischen Umgebungen adaptiv anpassen.
Produktionssysteme und Prozessregelung
Für Produktionsprozesse werden Methoden zur Modellierung, Überwachung, Regelung und Optimierung entwickelt. Dabei werden klassische regelungstechnische Ansätze mit datenbasierten Verfahren und Methoden der Künstlichen Intelligenz kombiniert, um Prozesse adaptiv zu betreiben und kontinuierlich zu verbessern, etwa in der Qualitätsregelung, Ablaufplanung, Fehlerdetektion und vorausschauenden Wartung.

Photonische und quantenmechanische Systeme
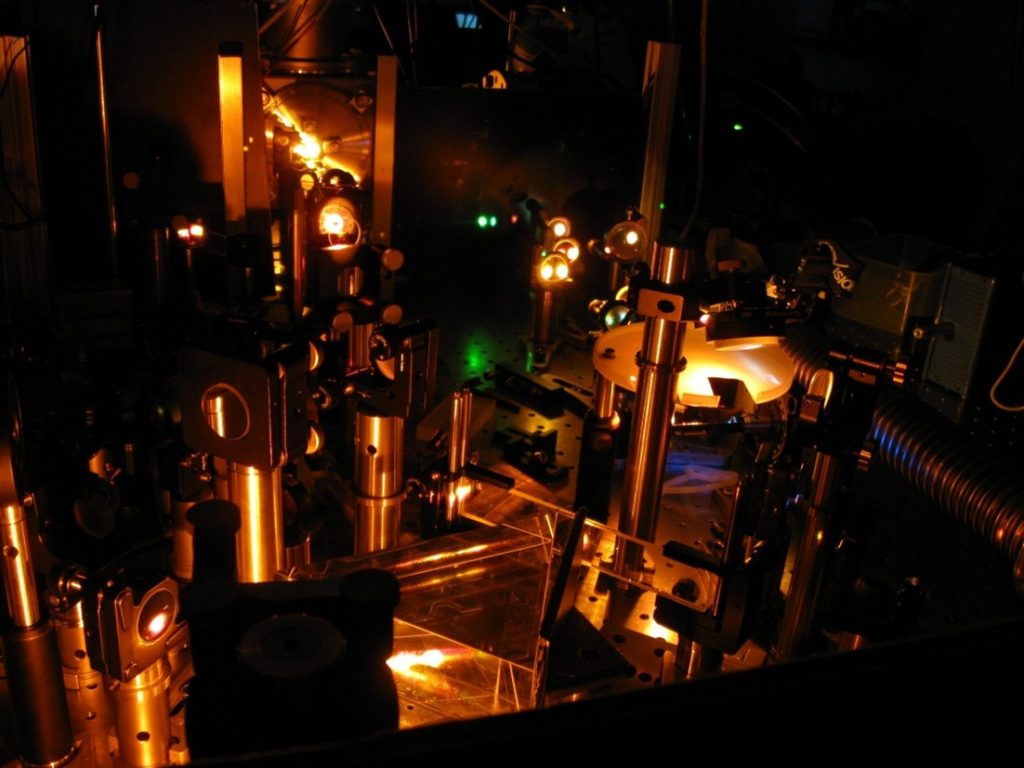
In diesem Bereich werden systemtheoretische Methoden zur Analyse, Regelung und gezielten Gestaltung hochdynamischer physikalischer Systeme eingesetzt. Ziel ist es, komplexe optische und quantenphysikalische Prozesse kontrollierbar zu machen und deren Verhalten unter realen Bedingungen präzise und reproduzierbar zu beeinflussen.
Nichtlineare Systeme
Dieser Bereich entwickelt Methoden zur Modellierung, Beobachtung und Regelung von Systemen mit ausgeprägt nichtlinearem Verhalten, wie sie in vielen technischen Anwendungen auftreten. Ein zentraler Fokus liegt auf dem integrierten Entwurf von Regelung, Sensorik und Aktorik im Sinne mechatronischer Gesamtsysteme. Dabei werden physikalisch basierte Modelle mit datenbasierten Ansätzen kombiniert, um komplexe und nichtlineare Dynamiken auch unter Unsicherheiten robust zu erfassen und adaptiv zu beeinflussen.
Robotic Systems Lab (RSL)
Das Robotic Systems Lab (RSL) konzentriert sich auf die Modellbildung, Systemanalyse und Regelung moderner Robotersysteme – von kollaborativen Robotern (Cobots) und mobilen Manipulatoren bis hin zu humanoiden Robotern. Die Forschung basiert auf modellbasierter nichtlinearer Regelung und nutzt Systemeigenschaften wie Passivität und trägheitsentkoppelte Koordinaten. Ergänzend werden datenbasierte Algorithmen eingesetzt, insbesondere für schwer modellierbare Phänomene. Die Forschungsaktivitäten gliedern sich in folgende Bereiche: Regelung elastischer Roboter (Soft Robotics), Physische Interaktion & Teleoperation, Ganzkörperregelung (Whole Body Control) und Beinbasierte Fortbewegung & Humanoide Robotik.
Regelung elastischer Roboter
Robotersysteme mit neuartigen elastischen Antriebskonzepten ermöglichen die Zwischenspeicherung von Bewegungsenergie und hochdynamische Manöver, erfordern jedoch ausgereifte Regelungskonzepte zur Schwingungsdämpfung Zudem werden Regelungskonzepte für Aufgaben mit abrupten Kontaktübergängen, wie Hämmern oder Stanzen, erforscht, um schädliche Kraftspitzen zu vermeiden und den Einsatzbereich kollaborativer Roboter zu erweitern.
Physische Interaktion & Teleoperation
Nachgiebige Regelungskonzepte wie die Impedanzregelung werden mittlerweile durch modell- und datenbasierte Prädiktion ergänzt und vorausschauendes Verhalten und Reaktivität zu kombinieren. Methoden der kraftreflektierenden Teleoperation werden für gefährliche oder schwer zugängliche Einsatzgebiete entwickelt, wobei die Behandlung von Laufzeitverzögerungen eine besondere Herausforderung darstellt.
Ganzkörperregelung (Whole-Body Control)
Komplexe Robotersysteme bestehend aus mehreren Teilsystemen erlauben die gleichzeitige Ausführung mehrerer Teilaufgaben mit unterschiedlicher Priorität. Hierarchische Regelungskonzepte ermöglichen hierbei eine dynamische Entkopplung der Aufgaben. Unsere Anwendungen umfassen die mobile Manipulation, humanoide Roboter, orbitale Weltraumroboter und seilgestützte Plattformen für industrielle Wartung.
Beinbasierte Fortbewegung & Humanoide Robotik
Humanoide Roboter rücken zunehmend in den industriellen Fokus. Unsere Arbeitsgruppe entwickelt Algorithmen zur Gangstabilisierung und Ganzkörperregelung, wobei biomechanische Ansätze mit KI-basierten Verfahren kombiniert werden. Neben Gehen und Laufen werden auch Bewegungsformen adressiert, bei denen der Oberkörper aktiv zur Fortbewegung beiträgt.
Lehre
Das ACIN ist wesentlich in die Ausbildung der Studierenden der Elektrotechnik und Informationstechnik eingebunden und vermittelt zentrale theoretische und methodische Grundlagen der Automatisierungs- und Regelungstechnik sowie der Robotik. Im Zentrum der Lehre steht das Verständnis technischer Systeme in ihrer Gesamtheit. Studierende lernen, komplexe dynamische Systeme zu analysieren, ihr Verhalten zu verstehen und durch geeignete Steuerungs- und Regelungsverfahren gezielt zu beeinflussen. Mathematische Modelle dienen dabei als Werkzeuge, um reale Systeme zu beschreiben und ihr Verhalten vorherzusagen. Gleichzeitig wird großer Wert auf die Validierung dieser Modelle und Methoden an realen Systemen gelegt.
Im Masterstudium Automatisierung und Robotische Systeme werden Inhalte von der Systemtheorie über den Regelungs- und Beobachterentwurf bis hin zu modernen robotischen Systemen vermittelt. Ein besonderer Schwerpunkt liegt auf systemtheoretischen Methoden zur Analyse, Synthese und Identifikation dynamischer Systeme sowie zur Bewertung von Stabilität und Performance unter Echtzeitanforderungen. Ergänzt wird dies durch Optimierungsverfahren und datenbasierte Ansätze, die insbesondere bei komplexen, nichtlinearen oder unsicheren Systemen eingesetzt werden. Ziel ist es, Ingenieurinnen und Ingenieure auszubilden, die komplexe Systeme nicht nur anwenden, sondern verstehen, hinterfragen und weiterentwickeln können.
Mitwirkende

Wolfgang Kemmetmüller
Univ.Prof. Dipl.-Ing. Dr.-Ing.
Institutsvorstand
Wolfgang Kemmetmüller studierte Mechatronik an der Johannes Kepler Universität Linz, promovierte 2007 an der Universität des Saarlandes und habilitierte sich 2017 an der TU Wien. 2024 wurde er zum Professor für Modellierung und Regelung nichtlinearer Systeme an die TU Wien berufen und seit 2025 leitet er das Institut für Automatisierungs- und Regelungstechnik. Wolfgang Kemmetmüller forscht im Bereich der Modellierung, Regelung und Optimierung komplexer nichtlinearer dynamischer Systeme mit Anwendungen im Bereich elektrische Antriebssysteme, Großraumrobotik und industrielle Produktionsprozesse. Er ist Editor in Chief der Zeitschrift Mathematical and Computer Modelling of Dynamical Systems und leitet das IFAC Technical Committee on Mechatronic Systems.

Andreas Kugi
Univ.Prof. Dipl.-Ing. Dr.techn.
Leiter Forschungsbereich Complex Dynamical Systems
Andreas Kugi (https://de.wikipedia.org/wiki/Andreas_Kugi) studierte Elektrotechnik an der TU Graz, promovierte 1995 an der Johannes Kepler Universität Linz und habilitierte sich dort 2000. Nach einer Professur für Systemtheorie und Regelungstechnik an der Universität des Saarlandes (2002–2007) folgte er 2007 dem Ruf an die TU Wien als Professor für Komplexe Dynamische Systeme und leitete das Institut für Automatisierungs- und Regelungstechnik (ACIN) bis 2023. Seit Juli 2023 ist er Scientific Director des AIT Austrian Institute of Technology, der größten außeruniversitären Forschungseinrichtung Österreichs. Seine Forschung umfasst Modellierung, Regelung und Optimierung komplexer dynamischer Systeme mit Anwendungen in Industrieautomatisierung, Mechatronik, Robotik und Quantenmechanik. Er veröffentlichte über 400 wissenschaftliche Arbeiten, ist Mitautor von über 170 Patenten und betreute mehr als 60 Dissertationen; ausgezeichnet wurde er u.a. mit dem IFAC Mechatronic Systems Outstanding Investigator Award (2022), der Goldenen Stefan-Ehrenmedaille des OVE (2023) und dem Kardinal-Innitzer-Würdigungspreis (2025). Von 2014 bis 2021 leitete er das Christian-Doppler-Labor für modellbasierte Prozessregelung in der Stahlindustrie, war Editor-in-Chief der IFAC-Zeitschrift Control Engineering Practice und ist Mitglied der Österreichischen Akademie der Wissenschaften sowie der Deutschen Akademie der Technikwissenschaften (acatech).

Christian Ott
Univ.Prof. Dipl.-Ing. Dr.-Ing.
Leiter Forschungsbereich Robotic Systems Lab
Christian Ott ist Professor für Robotik und leitet den Forschungsbereich Robotersysteme. Er studierte Mechatronik an der Universität Linz (Dipl.-Ing., 2001) und promovierte in Regelungstechnik an der Universität des Saarlandes (2005). Von 2001 bis 2007 war er am Deutschen Zentrum für Luft- und Raumfahrt (DLR) tätig. Anschließend arbeitete er bis 2009 als Project Assistant Professor an der Universität von Tokio. Danach leitete er am DLR eine Helmholtz-Nachwuchsgruppe und übernahm von 2014 bis 2022 die Leitung der Abteilung „Analyse und Regelung fortgeschrittener Robotersysteme“. Er war Associate Editor bei IEEE Transactions on Robotics, Co-Editor-in-Chief von IFAC Mechatronics und ist Senior Editor des International Journal of Robotics Research. Zudem war er General Chair der IEEE-Konferenz Humanoids 2020 und ist Editor-In-Chief für ICRA 2025-2027. 2018 erhielt er einen ERC Grant für Laufroboter mit elastischen Antrieben und 2025 einen anschließenden ERC PoC Grant. Seit 2023 ist er IEEE-Fellow und IFAC Council Member für den Zeitraum 2024-2029. Seine Forschung umfasst nichtlineare Regelungsmethoden für robotische Manipulation und Lokomotion.

Andreas Deutschmann-Olek
Assistant Prof. Dipl.-Ing. Dr.techn.
Andreas Deutschmann-Olek Olek studierte Automatisierungstechnik an der TU Wien und ist Assistenzprofessor am Institut für Automatisierungs- und Regelungstechnik. Seine Forschungsinteressen liegen an der Schnittstelle zwischen Regelungstechnik, nichtlinearen dynamischen Systemen und Physik. Er arbeitet an Regelungsmethoden für nichtlineare und unendlich-dimensionale Systeme mit einem besonderen Fokus auf Anwendungen in photonischen und quantenmechanischen Systemen. Er ist Mitglied des Exzellenzclusters Quantum Science Austria (quantA) und seine Forschungsarbeiten wurden u.a. mit dem Dr.-Ernst-Fehrer-Preis ausgezeichnet.

Andreas Steinböck
Univ.Prof. Dipl.-Ing. Dr.techn.
Andreas Steinböck ist seit 2007 am ACIN tätig. Davor hat er Mechatronik an der Loughborough University (Großbritannien) und an der Johannes Kepler Universität, Linz studiert. An der TU Wien promovierte er anschließend im Gebiet Regelungstechnik und habilitierte im Fach Systemtheorie und Regelungstechnik. 2025 wurde er zum Professor für Prozessautomatisierung berufen. Seit 2022 leitet er das Christian Doppler Labor für Intelligente Prozessregelung für hochwertige Stahlprodukte.
Andreas Steinböck forscht und lehrt im Bereich Modellierung, Systemanalyse, Entwurf, Identifikation, Schätzung, Optimierung, Steuerung und Regelung von nichtlinearen dynamischen Prozessen. Seine Forschungsergebnisse finden Anwendung in Produktionsprozessen in der Metallindustrie, der Nahrungsmittelindustrie und im Bereich Bioverfahrenstechnik.

Markus Vincze
Ao.Univ.Prof. Dipl.-Ing. Dr.techn.
Markus Vincze leitet den Forschungsbereich „Sehen für Roboter“ an der TU Wien. Nach Aufenthalten an der Yale University und bei HelpMate Robotics in den USA, erhielt er 2004 die Habilitation für „Robotertechnik“. Er vertritt Österreich in der europäischen Robotervereinigung euRobotics und leitete die EU Projekte wie ActIPret, robots@home und HOBBIT. Dank ihm wird der Weltkongress der Robotik, IEEE ICRA, von 1. – 5. Juni 2026 nach Wien kommen mit rund 8000 Teilnehmern. Markus’ besonderes Interesse gilt kognitiven Methoden um Robotern das Sehen beibringen in alltäglichen Umgebungen und insbesondere in Wohnungen. Zuletzt gelang ein Durchbruch beim Sehen und Handhaben von transparenten Objekten wie Gläser, Flaschen und Krügen.
Erwähnenswertes
Das Institut ist in zahlreiche nationale und internationale Forschungskooperationen mit akademischen und industriellen Partnern eingebunden. Diese Kooperationen tragen wesentlich dazu bei, neue Methoden zu entwickeln, unter realen Bedingungen zu validieren und in industrielle Anwendungen zu überführen. Exemplarisch seien einige ausgewählte Forschungslabore genannt:
Christian Doppler Labor für Modellbasierte Prozessregelung in der Stahlindustrie (2014–2020)
(Kooperationspartner: voestalpine Stahl GmbH)
Das CD-Labor widmet sich der modellbasierten Analyse, Regelung und Optimierung industrieller Produktionsprozesse. Im Fokus stehen physikalisch fundierte Modellierung und systemtheoretische Methoden sowie deren Anwendung und Validierung unter realen Betriebsbedingungen, insbesondere in den Prozessschritten Warmwalzen und Feuerverzinkung von Stahlbändern.
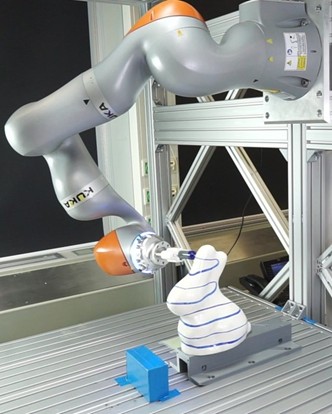
Festo Systemlabor für autonome Handhabungssysteme (2019-2026)
(Kooperationspartner: Festo AG)
Das Festo Systemlabor bearbeitet Fragestellungen autonomer Handhabungssysteme mit einem Fokus auf lernbasierte robotische Verfahren. Im Mittelpunkt stehen die Erfassung und Übertragung von Bewegungen und Prozessparametern mittels Sensorik und maschinellem Lernen sowie deren Einsatz in industriellen Bearbeitungsprozessen.
Christian Doppler Labor für Intelligente Prozessregelung für hochwertige Stahlprodukte (2022-2029)
(Kooperationspartner: voestalpine Stahl GmbH)
Dieses CD-Labor widmet sich der anwendungsorientierten Grundlagenforschung zur Modellierung, Analyse, Regelung und Optimierung von Produktionsprozessen für hochwertige Stahlflachprodukte. Im Fokus stehen die Entwicklung echtzeitfähiger Prozessmodelle sowie deren Einsatz zur Untersuchung von Stabilität, Robustheit und Sensitivität, insbesondere in Prozessschritten wie Stranggießen sowie Wärmebehandlung und Oberflächenveredelung von Stahlbändern.
TUW/DLR Joint Laboratory on Human-Centered Robotics (seit 2024)
(Kooperationspartner: Deutsches Zentrum für Luft- und Raumfahrt e.V.)
Das Joint Lab verfolgt das Ziel, international sichtbare Forschung im Bereich der Human-Centered Robotics zu entwickeln, mit einem Schwerpunkt auf Echtzeitregelung, physischer Mensch-Roboter-Interaktion und der Integration lernbasierter Methoden.
Leuchtturmprojekt AI-Enabled Automation (2022-2026)
(Kooperationspartner: AIT Austrian Institute of Technology)
Im Rahmen dieser Kooperation werden regelungstechnische und KI-basierte Ansätze kombiniert. Schwerpunkte sind der (semi-)autonome Betrieb von Robotersystemen in unstrukturierten Umgebungen sowie die datenunterstützte Qualitätsregelung in industriellen Produktionsprozessen.
Exzellenzcluster Quantum Science Austria, quantA (seit 2023)
(Kooperationspartner: Universität Innsbruck, ISTA, JKU Linz, ÖAW, Universität Wien) QuantA bündelt die österreichische Quantenforschung zur Bearbeitung grundlegender Fragestellungen in den Bereichen Quanteninformation, Quanten-Vielteilchensysteme sowie der quantenphysikalischen Natur von Raum und Zeit. Am ACIN werden Methoden zur kontrollierten Manipulation von Quantenzuständen und dem integrierten Design zukünftiger Quantenexperimente erforscht.